

みんな大好き・ロボットベンダー編
ロボットベンダー、聞いたことありますか?
わが社に2年くらい前に導入したんですが…
ロボットベンダー、想像がつきますでしょうか。
ロボ×曲げ機械(ベンダー)
想像が…つきますね。
ロボットが曲げ加工をしてくれるんです、なんとなく近未来・SF感。
ロボットベンダーと聞いて読者の皆様が思うイメージを当ててみましょう。
⦁ ロボット
⦁ なんとなくライン作業感
⦁ なんとなくR2-D2
(ド素人感強めの感想)
まあ私自身が最初に聞いたときにぱっと思ったことたですけど、意外と②③は違ってました。
ちなみにR2-D2はうちで使っているKEYENCE社の3次元測定器が一番近いです。
この記事はまた別個記載したいと思っています。
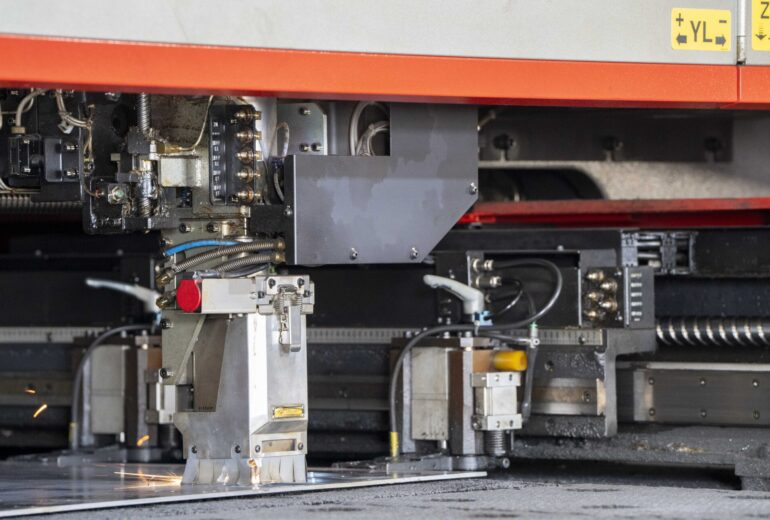
実物はこんな感じ!

関節をいっぱいつけたロボットアーム、かっくいーーーー!!!
このアームが材料を吸って持ち上げ、掴みかえてくわえ、奥にあるベンダーへと運んで加工してくれます。
搬出はコンベヤで配列や置き方にも指示が出せます。
では実際ロボットベンダー、現場運用するためにすることは?
⦁ ロボット用の曲げプログラムを作成する
⦁ 試運転チェック→修正→プログラム本採用
⦁ 運用開始
大まかにいうとこうなんですが…掘り下げてみましょう。
ロボットベンダー・どうやって使うか?
① ロボット用の曲げプログラムを作成する
専用のCAMで、ロボットをどのように動かしていくかのプログラムを作ります。
ロボットベンダーの種類によっても運用可能な重さや大きさがあるので、まずは図面でこれならいけそう!というアタリをつけてからプログラムを組んでいきます。
大体の道筋は材料向きや突き当て位置でプログラム自体が計算をして出してくれますが、
初期の材料配置からロボットのアームがどのように動いてどんな軌道を描くのか細かい指示を出すこともできますし、道筋だけオートで組んでもらって微調整という形も取れます。
製品によってはロボットがモノを掴む位置や持ち替え効率を考えて何パターンか検証する必要もあります。
プログラムといっても世間一般のイメージするコードカタカタ…という感じでは無く、
ロボットベンダーが画面に表示され、箇所を指定して向きや動きを指示していくイメージです。
これがゲームみたいで結構楽しい!
動きを矢印で決めたり、点を描いて追従させるようにしたり、どのロボットの軸(関節みたいなもの)を回転させるかとか指定してムービー?で動作チェックするんですけど!楽しい!楽しい!難しい!
ロボットは指定されたプログラム通りにしか動けないので、モノの干渉や距離感にも気を付けながら作成していかないといけませんね。
できるだけロボットが材料を持ち替えたり無駄な動作をしないように、頭の中で曲げる順番を考えてプログラムを作ってあげることになります。
プログラムがロボットベンダーを運用する際の肝になるので、ここがこなせればあとは流るまま…ってほど単純でもないですが、山場①は超えたと思っていいです。
② 試運転をする
できあがったプログラムを携えて、実機へと向かいます。
現場でのイレギュラーはつきもの、例えば想像より材料がしなってしまい上手くロボットが掴んでくれない、やら、バキューム位置が悪くて持ち上げてくれない、など数えられないほどのトラブルエラーがあるわけですね。
そういった実作業でのトラブルシューティングをするために試運転を必ず行います。
手順自体は至って簡単、1工程1工程を超絶スローモードにして時折ストップをかけながらその場でプログラムの修正をする、だけです。
だけ、です。(所要時間推定3時間~)
普段ロボットを動かすときを100速度とすると、試運転では1まで落とすこともザラです。
1秒の間に動く過程を20秒かけて動かしてみながら検証する、という表現が想像つきやすいでしょうか…?
パソコンで見るモノとロボットの動きと、実際に動くロボットと製品での違いを認識しながら、バックゲージや突き当て、ロボットの動きに修正を加えます。
最後に全工程が終了したあとに次のサイクルに入るかをチェックし、搬出まで確認がとれたらようやく完成となります。

いやあ、おつかれ、ほんとおつかれさま。以上だよ、項目分けすると2個にしかならないよ。一日以上かかるのにね。
そうなの、1日終わっちゃうの。
むしろ1週間くらいすぐ終わっちゃうよね。
ベンダーの基礎知識さえあればあとはロボットのクセに慣れるだけなので、大丈夫、心配ないよ。
というわけでした!(?)
ロボットベンダーの利点は
・人がいなくても夜通し回せる
人件費の削減にも、時間の有効活用にも良いです。
夜勤の環境がない工場でも、自動電断(作業が終わると金型を片付けて電源を落としてくれる最高機能)で帰り際にセットしていくことができ、
積載を考えて対処してあげれば文字通り夜間フル活動してくれるかわいい相棒。
・ロボットに任せて他の仕事に回れる
ちょっと営業や打ち合わせで外出したい、1時間だけ納品で外を回ってきたい、そんなときにセットして出かけます!
お願いね、って愛情を込めて角度を出しながら設定したら後はお任せします。
これが意外と助かる、1時間だけ曲げててくれれば大分後が詰まらなくていいんだけどなあ…って時に、ほんとに。
この子部品曲げたら溶接にもっていけるんだけど結構数がある上に打ち合わせが入ってるとき…
「ロボットかけとくからさ、曲がったとこから回収して溶接進めていいよ」
なんて言えちゃったりします、いいですよねえ。
愛すべきロボットベンダー
動きもシュールでかわいいですよ。
横軸の移動はめちゃ早なのに縦はすっごい慎重、ちょっと間が抜けててかわいい。
どんどん活用して是非ともロボ文明を築き上げていきたいところですね!
それではまた!

この記事を書いた人
うちだ あいり
ロボットベンダーは緩急ある動きがシュールで大好き、疲れてるときに見てるとコミカルな動きに微笑みが漏れる。(多分監視カメラで見られてるけど)